Traffic Prediction
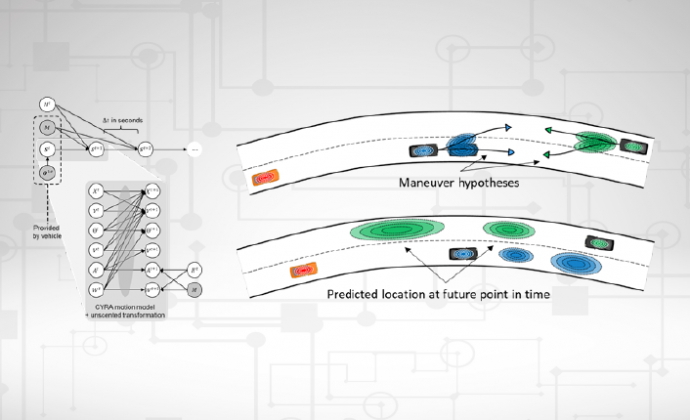
The TeamMate car requires the ability to anticipate the future evolution of the traffic scene. To achieve this goal, the traffic prediction comprises situation and vehicle models in a probabilistic model that can predict the temporal and spatial evolution of traffic participants observed in the vicinity of the TeamMate vehicle (including the TeamMate vehicle itself). In
this model, a traffic participant is represented by a six-dimensional Gaussian belief state, comprising its location, yaw angle, velocity, acceleration, and yaw-rate. The dynamics of traffic participants are modelled via the constant yaw-rate and acceleration (CYRA) motion model. A map of the environment and simple driver models are used to derive probable
future control signals. Passing belief states through the non-linear system dynamics are achieved by unscented transformation.
Where is it integrated?
VED vehicle demonstrator
ULM simulator demonstrator
Click here to download the description of all the AutoMate Enablers.