Driver Intention Recognition
Description:
To develop a shared understanding between the driver and the automation, the TeamMate car requires knowledge about the current manoeuvre intentions of the driver. When the driver is in control, such knowledge can be used to assess the safety
of intended maneuvers and provide adequate information and warnings. If the automation is
in control, it can be used to trigger intention compliant behavior of the automation or to detect
and communicate mismatches between the driver’s intention and the TeamMate car’s behavior. For this,
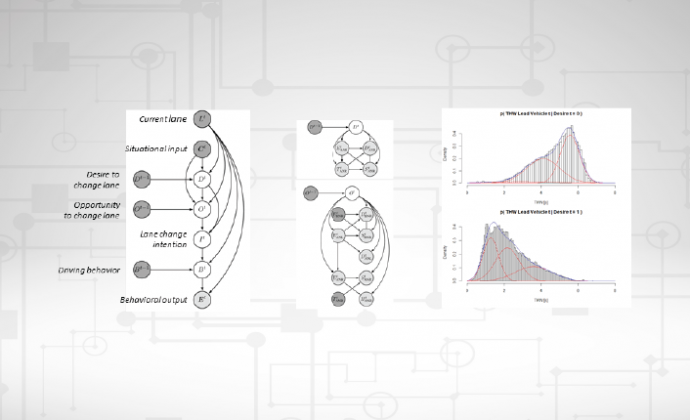
the TeamMate vehicle uses probabilistic models for recognizing and predicting maneuver intentions in rural road and roundabout scenarios. The models are designed as (conditional) Dynamic Bayesian Networks that are learnt by machine-learning methods from annotated time-series of human driving behavior.
Where is it integrated?
VED vehicle demonstrator
ULM simulator demonstrator
REL simulator demonstrator
Click here to download the description of all the AutoMate Enablers.