Planning and execution of safe manoeuvre
Description:
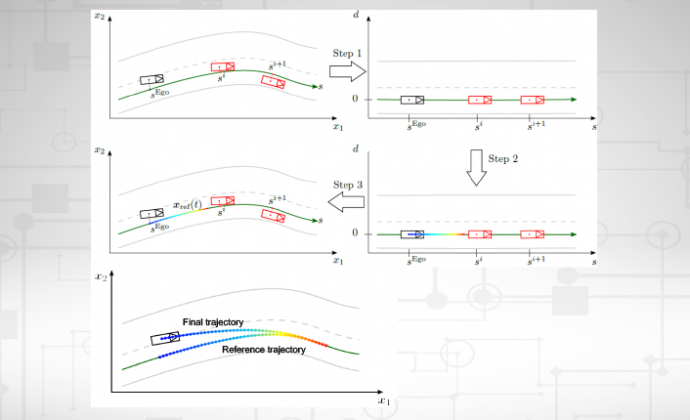
Based on the environmental model, trajectory planning has to be performed to guide the vehicle
safe and comfortable through the environment. The trajectory planning algorithm used within the TeamMate concept was designed for on-road driving. Necessary inputs for the planner are a prerecorded digital map for having the road infrastructure information. The ego vehicle state, which is identical to the start state of the trajectory to be
planned, vehicle tracks to keep safe distances from and the information input from the driver. Based on this information, the first step is to project the vehicle on the center line of the one road the planner aims to guide the vehicle towards. A driver model is integrated over the planning horizon to obtain a “reference“-trajectory. This reference is then included into the cost functional of an optimal control problem.
Where is it integrated?
VED vehicle demonstrator
ULM vehicle demonstrator
Click here to download the description of all the AutoMate Enablers.