Planning and execution of safe manoeuvre (CRF)
Description:
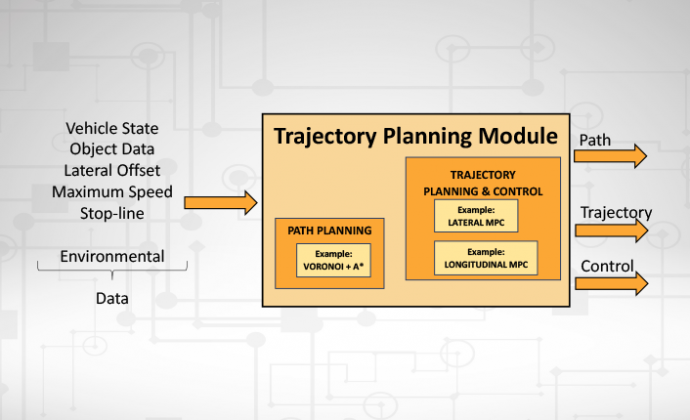
Trajectory planning and execution are two basic requirements for autonomous driving and must be present in every automatically controlled vehicle. In AutoMate, we focused on aspects of decisionmaking, motion planning and control for self-driving cars. This module takes as inputs the driver’s state and the environmental situation. Based on this data, potential strategic maneuvers are identified and planned up to a concrete action sequence at operational level. The aim of control is to follow longitudinal speed and distance references defined by the driver or by road camera information available.
The aim of lateral control is to minimize lateral deviation and heading angle errors, ensuring the vehicle stability. The resulting plans include a suitable task distribution plan between driver and automation.
Where is it integrated?
CRF vehicle demonstrator
Click here to download the description of all the AutoMate Enablers.