Online Learning
Description:
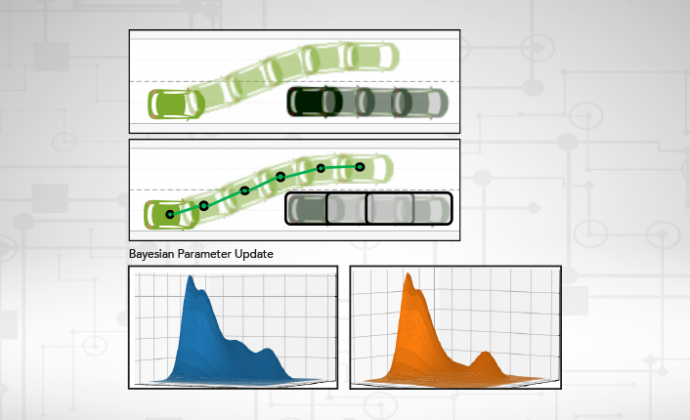
The Online Learning of Intention from the Driver updates the Driver Intention Recognition model while driving to fit the individual driver. This shall improve cooperation due to reduced false alarms for the lane change intention recognition and the adaptation of the automation behavior to the driver’s preferences. Via Bayesian parameter learning and the usage
of hyper-parameters, the distribution parameters of the underlying Dynamic Bayesian Network are recalibrated. The hyper-parameters describe probability distributions over the model parameters and are updated as new evidence becomes available through observations while driving. To create a complete training data set the required labels are generated in the process via smoothing or with rules to interpret the driver feedback provided via the HMI.
Where is it integrated?
VED vehicle demonstrator
ULM simulator demonstrator
Click here to download the description of all the AutoMate Enablers.